A Soft Exosuit for Flexible Upper-Extremity Rehabilitation
The paper can be seen here.
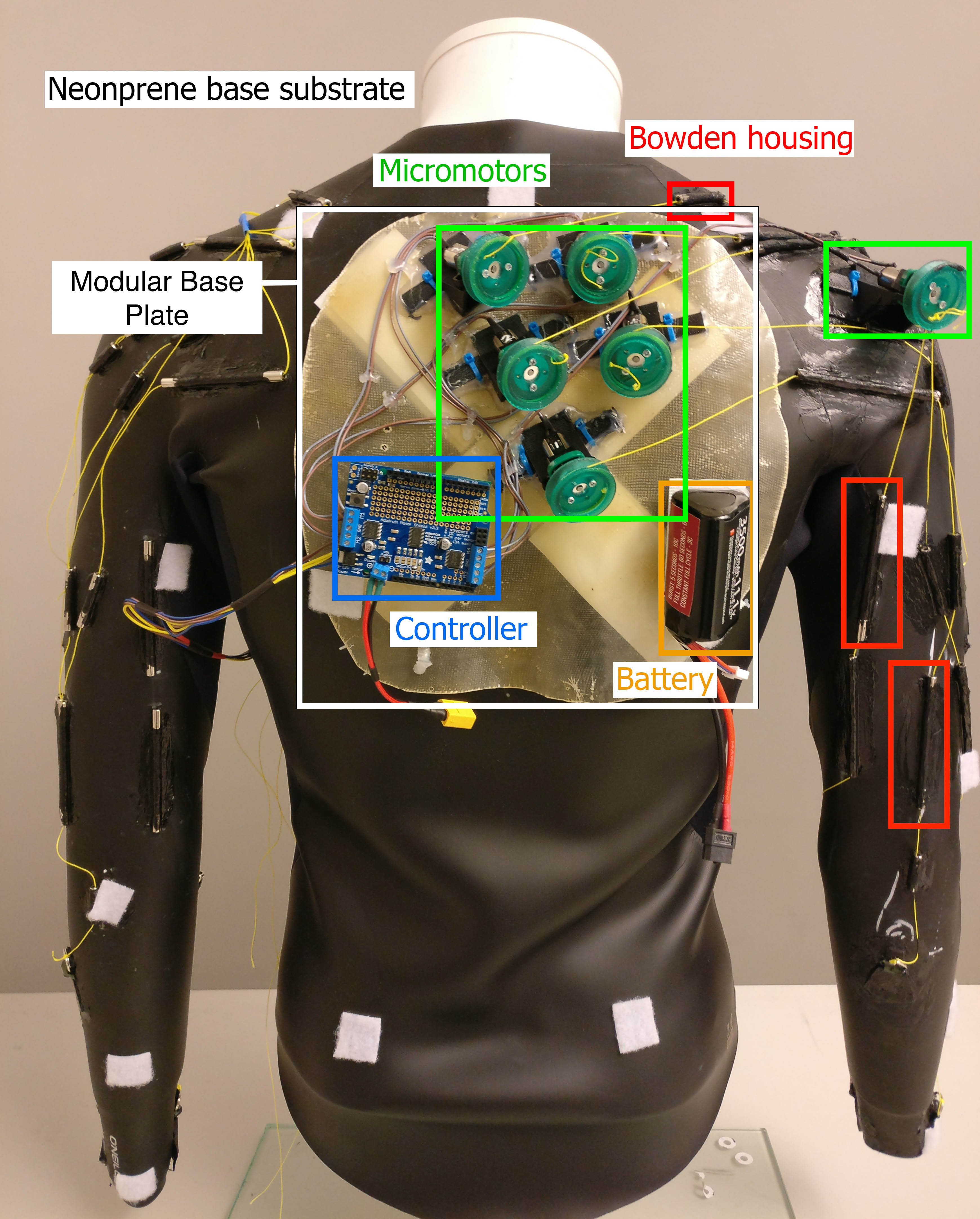
The second iteration of CRUX involved improvements in actuated motion, user-safety, and a narrowed focus of stroke rehabilitation. A mimetic control algorithm was used to induce mirror therapy. Different pathways in the motor cortex can help rehabilitation when there is intention to move the impaired arm alongside visual confirmation that the arm is moving.
We analyzed the ability of the suit to reduce metabolic cost through heart rate measurements. The results displayed that CRUX was able to reduce the amount that both impaired and unimpaired users' heart rate rose during weighted bicep curls.

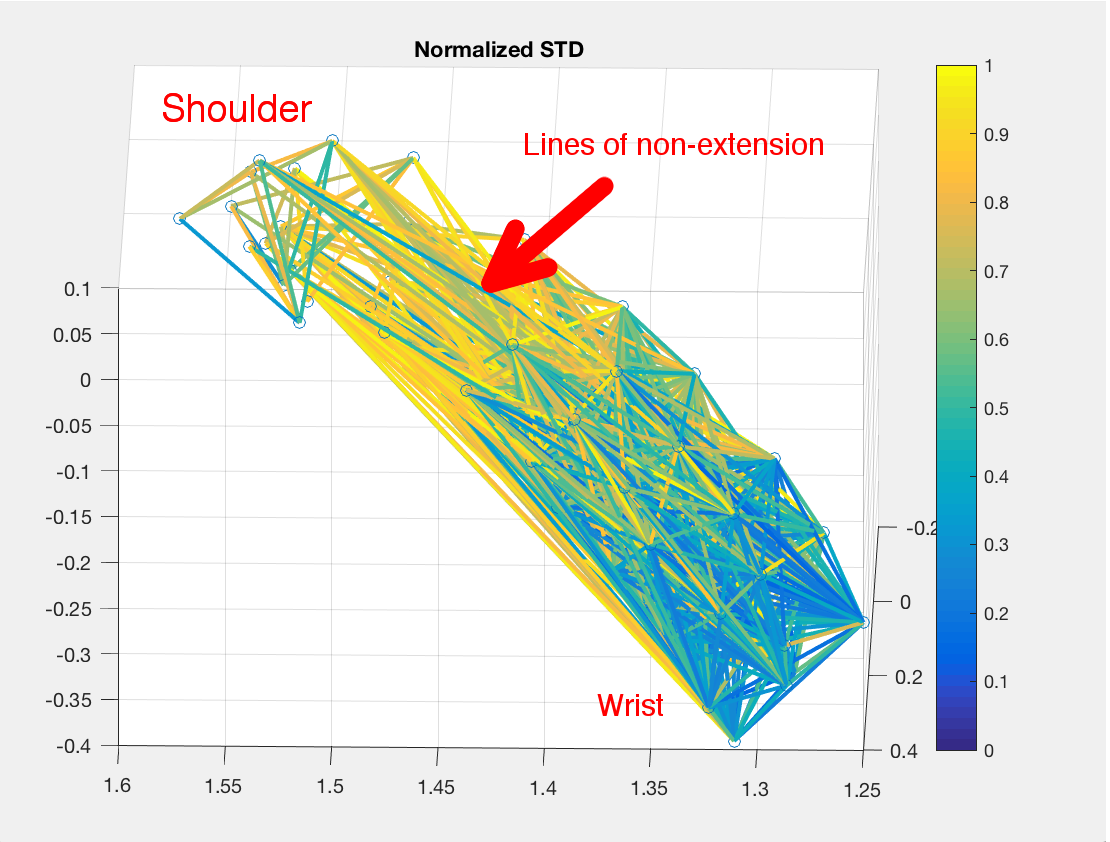
In order to optimize locations for the cable housing, I designed an algorithm that calculates line of minimal displacement. These exist between points on the body that move minimally through all potential motion.
For example:
During a bicep curl we would expect a line between the forearm and the bicep to move a large amount, while a line on the sking orthogonal to the motion of the bicep would hardly move.